ES155: Systems and Control Theory – Fall 2023
ES155 explores the fundamentals of information systems in the real world. It provides a foundation in signal processing, systems design and analysis, control, and communications, while introducing key linear-algebraic concepts in the context of real-life applications.
Topics included linear algebra, the elemental representations of dynamic systems, stability analysis, the design of estimators (e.g., Kalman Filter), and feedback controllers (e.g., PID and Optimal Control).
I completed a final group project over the course of the semester (explained below), and submitted a final report with our findings (attached below).
Team members: Langa Siziba and David Perez-Cruet
Harmonizing Nature: Balancing Predators, Prey, and Sustainability in Coldwater Ecosystems
Abstract
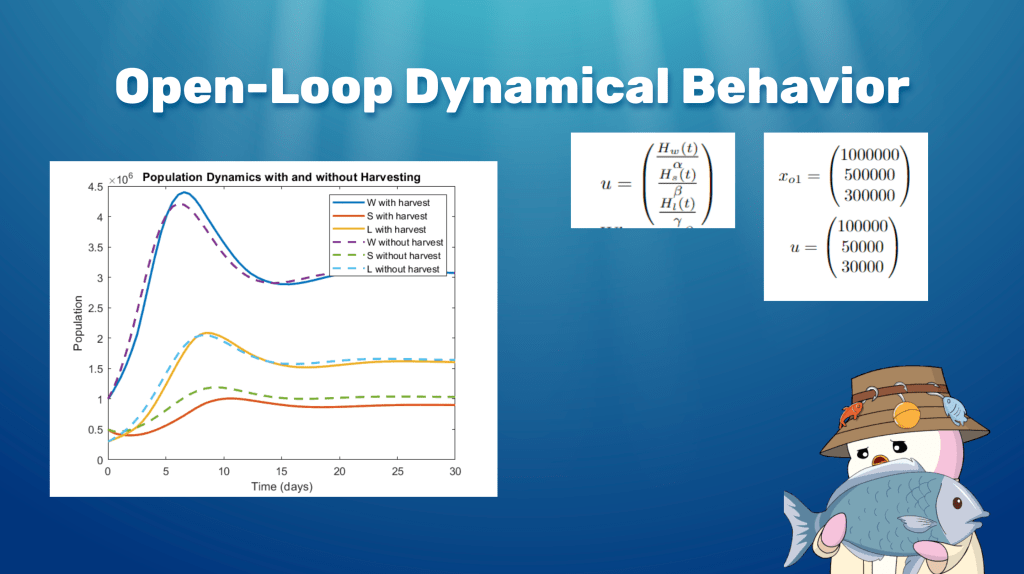
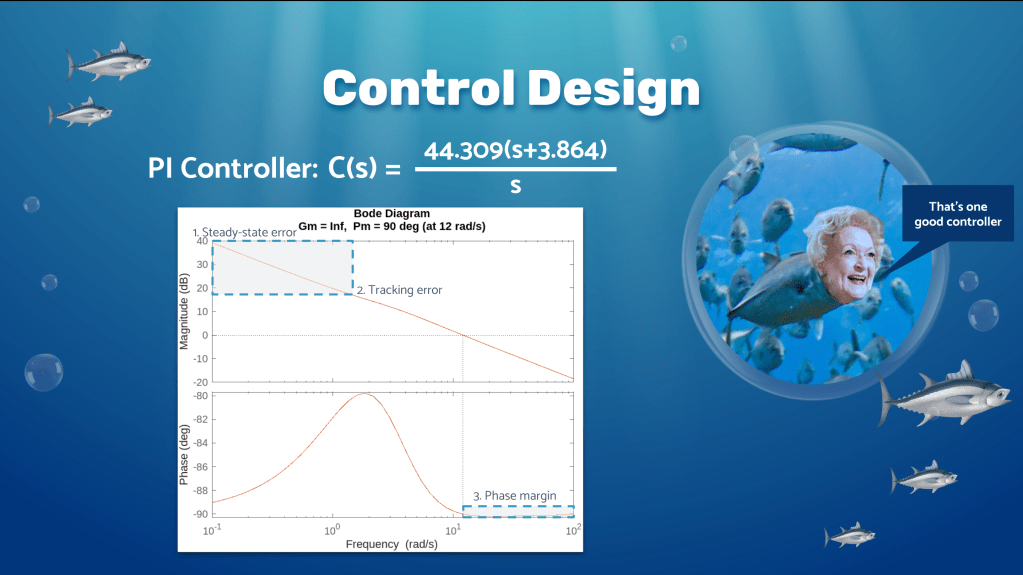
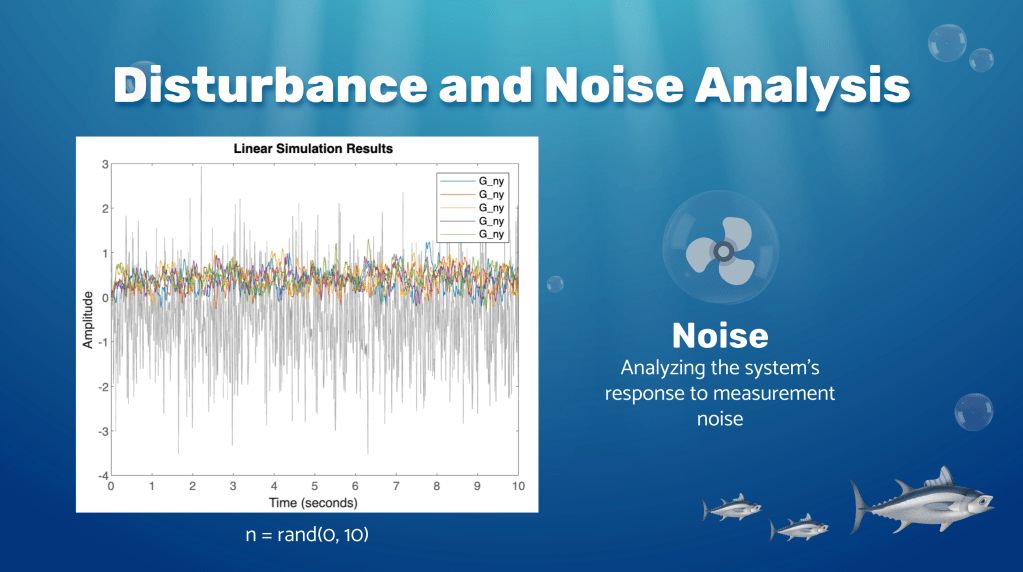
As global weather patterns increase in intensity alongside an increasing demand for seafood, proper management is essential in maintaining healthy fisheries and aquatic ecosystems. Properly assessing, interpreting, and maintaining population dynamics is vital for managing ecosystem dynamics. Specifically, this report analyzes the population dynamics of a large freshwater ecosystem composed of native salmon and whitefish as well as invasive lake trout. The lake trout and salmon compete to prey on the whitefish, and recreational and commercial fishermen harvest all three species. The mathematical model has its foundation in the Lotka-Volterra predator-prey model, while the control mechanism is the harvest of each species. The objective is to maintain robust, healthy populations of salmon and whitefish while minimizing the impact of lake trout. Through the use of MATLAB’s Control Design Toolbox, the model indicated that managing the fishing and harvest of a system could lead to stable ecosystem dynamics.